
Potápěčské počítače
Poslal dopisovatel Stran potápěčských
Algoritmy v potápěčských počítačích
Vzhledem k tomu, že od vydání článku „Dekompresní teorie a praxe“ uplynulo již dvacet let a za tuto dobu potápěčské počítače prošly velkými změnami, považuji za vhodné na tuto skvělou práci Tomáše Sládka navázat. Tento článek popisuje aktuální stav (podzim 2020) použití dekompresních algoritmů v nejrozšířenějších potápěčských počítačích v ČR. V nich se dnes prakticky setkáme pouze se třemi matematickými modely.
Bühlmann ZHL
Některé starší produkty ještě implementovaly starší varianty ZHL (ZHL-8, ZHL-12). Dnes se již setkáme pouze s poslední variantou ZHL-16C, v některých případech možná ještě s variantou B. Ta se liší pouze menším konzervatismem ve střední části tabulky mezních hodnot nasycení tkání. Většina výrobců stále zůstává u tohoto zavedeného algoritmu, protože je statisticky nejlépe prověřeným. Najdeme jej prakticky v drtivé většině technických počítačů. Všechny přístroje implementující tento algoritmus zároveň používají pro nastavení konzervatismu gradient faktory. Použití v rekreačních počítačích se opírá o nastavení konzervatismu výrobcem definovanými skupinami gradient faktorů, takže i méně zkušený uživatel je schopen tyto hodnoty bezpečně nastavit. Aqualung ve svých přístrojích ještě používá Pelagic Z+ algoritmus, ale ten je také odvozen od ZHL a podle výrobce je s ním plně kompatibilní. Nabízí ale pouze dvě hodnoty konzervatismu, což limituje jeho flexibilitu.
VPM
Tento model není běžně výrobci implementován. Setkáme se s ním např. u přístrojů italské firmy RatioDeco. Ostatní výrobci jej zpravidla nabízí pouze jako alternativu k ZHL modelu (např. OSTC 4). Z nabídky na trhu není vidět, že by výrobci začínali na tento model přecházet nebo jej alespoň více nabízet ve svých produktových řadách. Není mi ani známa nějaká snaha o rozsáhlé praktické ověřování tohoto modelu lékařskými výzkumy.
RGBM
Jedná se patrně o nejrozšířenější a nejvíce testovaný bublinkový model. Například firmy Suunto, Mares a Cressi se vydaly formou vlastní RGBM implementace a u ní i nadále zůstávají.
Algoritmus RGBM u modelů Suunto prochází vývojem a byl několikrát aktualizován. Momentálně jsou přístroje této firmy dodávány s verzí Suunto Fused™ RGBM 2. Vzhledem k tomu, že RGBM algoritmus stále zůstává uzavřený a jeho specifikace tedy není známá, tak ani není známo, jaký vliv mají možnosti nastavení na výstupovou křivku. Výrobce v propagačním videu uvádí, že je velmi intenzivně testován v praxi. Což nelze říci o VPM modelu (viz. také https://www.youtube.com/watch?v=X83xmfKF4hw).
Zajímavostí je, že někteří výrobci se vydávají cestou nabídnout zákazníkovi možnost výběru z vícero algoritmů. Možnou motivací by se mohlo zdát, že i s různými přístroji jsou členové týmu schopni dosáhnout shodného nastavení algoritmu, a tedy i očekávané dekomprese. Je třeba si však uvědomit, že model je většinou implementován výrobcem samotným a vždy tedy budou mezi přístroji různých výrobců rozdíly minimálně na úrovni zaokrouhlování nebo odlišnému pochopení implementačních detailů (viz např. „Není Bühlmann jako Bühlmann“). U nejdražších modelů se tak můžete setkat s možností výběru mezi ZHL-16C a VPM. Pokud se jedné o model s RGBM, pak výrobce nabízí jako alternativu ZHL algoritmus. Všechny přístroje se chlubí tím, že nabízí dostatečnou bezpečnost (jinak by si je nikdo nekoupil), ale jsou mezi nimi velké rozdíly. Rozdíly jsou patrné už jen ve výchozích nastaveních. Např. Suunto nerozlišuje slanou a sladkou vodu, Aqualung i300c nastavuje konzervatismus pomocí dvou hodnot. Přísnější hodnota pak odpovídá potápění v o 950 m vyšší nadmořské výšce. Pro ukázku přikládám několik hodnot bezdekompresních časů ponoru na vzduch. Cílem není porovnat bezpečnost přístrojů, ale přesvědčit se o tom, že rozdíly nejsou malé.
| Algoritmus | Bühlmann ZHL-16C | Bühlmann ZHL-16B | Pelagic Z+ | RGBM | RGBM Fused 2 | Mares RGBM |
|---|---|---|---|---|---|---|
| Výrobce/Model | Shearwater | DiveSoft | Aqualung | Suunto | Suunto | Mares |
| Hloubka [m] | Teric | Freedom | i300c | Vyper Air | Eon Steal | Quad |
| 12 | 124 | 157 | 77 | 126 | 99 | |
| 15 | 69 | 79 | 51 | 72 | 72 | 69 |
| 18 | 45 | 43 | 35 | 52 | 52 | 49 |
| 21 | 32 | 29 | 24 | 37 | 37 | 36 |
| 24 | 23 | 20 | 18 | 29 | 28 | 28 |
| 27 | 18 | 15 | 13 | 23 | 21 | 22 |
| 30 | 14 | 11 | 10 | 18 | 17 | 18 |
| 33 | 12 | 9 | 8 | 13 | 13 | 15 |
| 36 | 10 | 7 | 7 | 11 | 10 | 12 |
| 39 | 10 | 6 | 6 | 9 | 8 | 11 |
| 42 | 8 | 5 | 5 | 7 | 7 | 9 |
U ZHL algoritmu jsem pro DiveSoft zvolil hodnoty gradient faktorů (GF) tak, aby byly srovnatelné se Shearwaterem, tedy 40/85, i když výchozí hodnotou u DiveSoftu je 30/70. Všechny ostatní počítače byly nastaveny na první ponor (bez nasycení tkání) ve výchozím nastavení konzervatismu a nadmořskou výškou přibližně 250 m n. m. ve sladké vodě (nelze nastavit u všech počítačů).
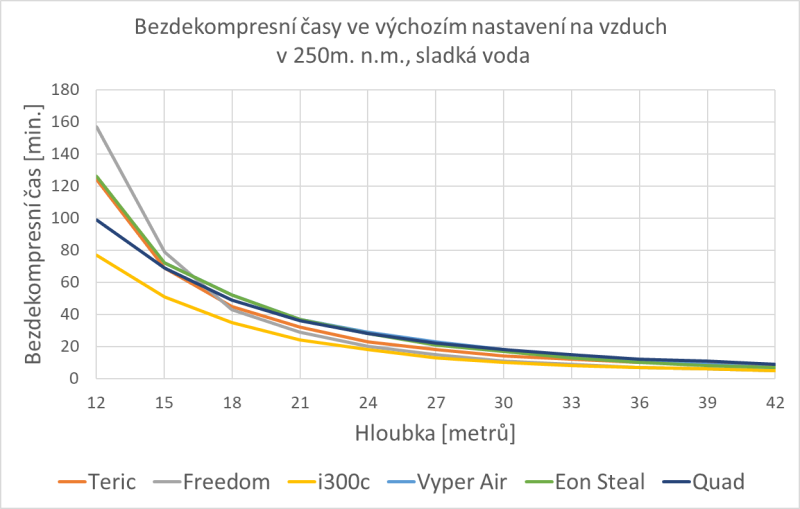
Na první pohled vidíme, že křivky kopírují podobný průběh. Rozdíly jsou samozřejmě nejmenší ve větších hloubkách, kde jsou bezdekompresní časy minimální. Nejdůležitější informace je, že i v hloubkách kolem 20 metrů jsou rozdíly až 20 minut, což je rozdíl velmi významný. I ve třiceti metrech jde vidět hodnoty v rozsahu 10-18 minut. Dále doporučuji si povšimnout rozdílu mezi implementacemi Suunto RGBM, kde je vidět, že ani dvě zařízení od stejného výrobce nedávají stejné výsledky. Nejdramatičtější rozdíl je vidět mezi Shearwaterem a DiveSoftem, kteří opět implementují stejný model algoritmu. Nejpřísnější je Aqualung, který proti ostatním vypadá až zbytečně přísný.
Závěr
Je důležité si uvědomovat, že mezi počítači jsou velké rozdíly, a je třeba s tím počítat. Rovněž nastavení počítače je třeba měnit s rozumem. Není žádný nejlepší algoritmus, ani nejlepší implementace konkrétního výrobce. O reakci těla víme stále málo a všechny modely jsou doposud málo ověřeny lékařským výzkumem. Je tedy jen na uživateli, kterému algoritmu a jeho nastavení konzervatismu důvěřuje.